
Feature: University Racing Eindhoven
To kick off the New Year, I headed across the border to our local team from TU Eindhoven to see their workshop and hear about their extensive testing plans for the 2017 Formula Student season.
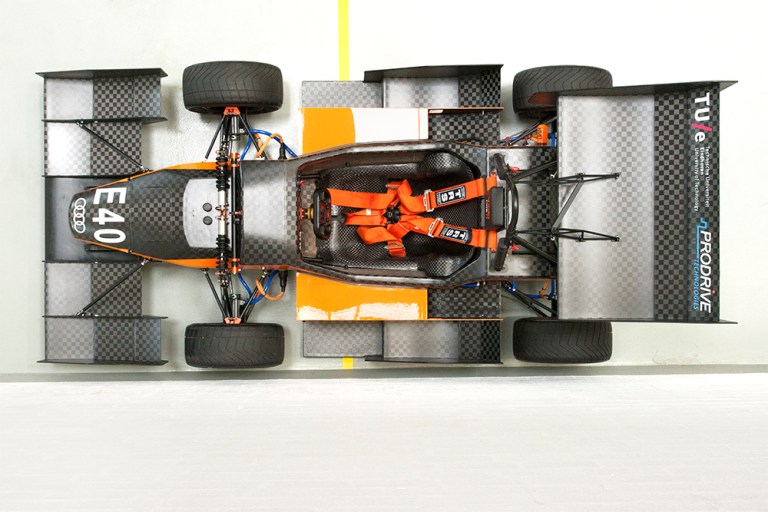
The team from Eindhoven, University Racing Eindhoven have always been an exceptionally friendly team in the garages and their eye-catching orange car “URE11” is instantly recognisable.

I was keen to speak to their Team Manager for the 2017 season, Jesse Koenders, to find out a bit more about the car design and the goals for the team in 2017.
Eindhoven is a great location, considered to be one of the best areas in Europe for innovation and start-ups. The team is a reasonably large team, with a combination of full and part-time students working on the car, often for more than just one year. This is an imperative consideration for all FSAE/Formula Student teams to make, as knowledge transfer across academic years is a crucial element to get right if the team is looking to build a good car year after year.
The team do not disappoint in their workshop. As I arrive, they have just finished a test session with the URE11 and they are returning (and cleaning) it in a regimented manner. Jesse explains that they are testing around twice a week, which is very positive. You cannot test these cars enough.
But the part of their workshop that really caught my eye was “The Planning Room.” This room is the visual representation of the team’s project plan and I am incredibly impressed by it. Although it is often easier to have plans and deadlines entirely computer-based, they cannot choose to ignore this (as you could with a computer-based plan) even if they wanted to.

So the team have got their planning in check, but I still wanted to know more about the orange beast that is URE11, the 2016 car.
Chassis
Two piece, top and bottom half, CFRP Sandwich Structure with aluminum honeycomb core. In-house laminated using pre-impregnated carbon fibers. Stiffness form axle to axle: 3000 Nm/deg. Weight with front hoop: 16kg.

Suspension
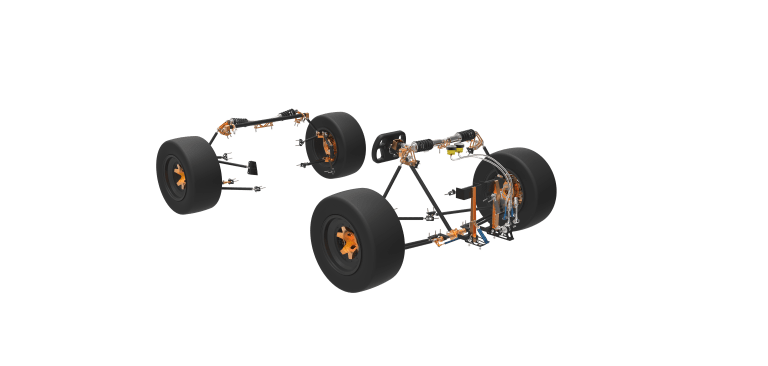
Geometry
Wheelbase: 1535mm, Trackwidth: 1180/1139 mm (F/R).
Rear: Equal-length double wishbone, pushrod actuated.
Front: Unequal-length double wishbone, pushrod actuated.
Front and rear anti-roll bar with flex blades.
Adjustable Ackerman, toe, camber and anti-effects using shims.
Tyres
205-50R10 Custom Apollo R & D
Slicks: Designed for lower working temperature. Rain: Self-developed rain tyre profile.
Shocks
Ultra-lightweight, low-speed adjustable Koni F1 dampers
Manufacturing
Use of universal suspension brackets for ease of manufacturing.
Braking
Front 4 piston, rear 2 piston calipers, adjustable bias, custom brake discs. Regenerative braking.
Powertrain
4-wheel drive fully self-developed powertrain
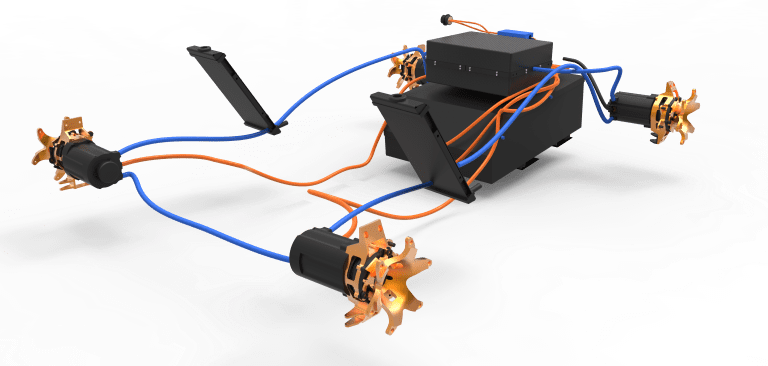
In wheel electric machines
Custom URE/AE PM electric machines, capable of 33Nm and running up to 18.000 RPM
Max power output of 30kW
Weighing in at 3.5kg per machine.
Electric drives
Custom URE/Prodrive quad inverter with carbon fiber casing. Weighing in at 12kg.
Accumulator
96s3p configuration good for 19.8 Ah at 355V nominally. Capacity of 7kWh. With self-developed battery management system.
Cooling system
Dual radiator, single circuit water-cooling of electric machines and drives.
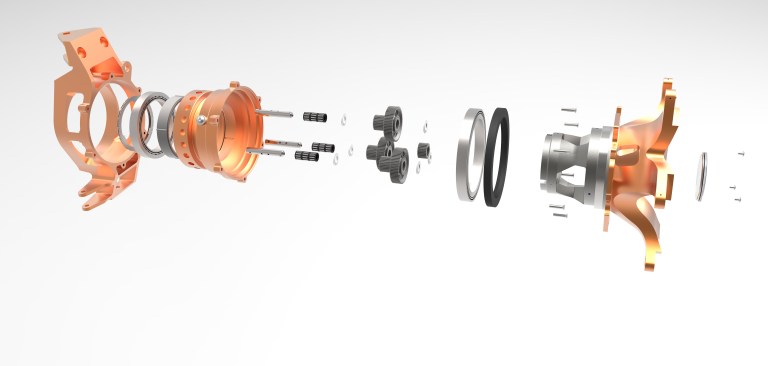
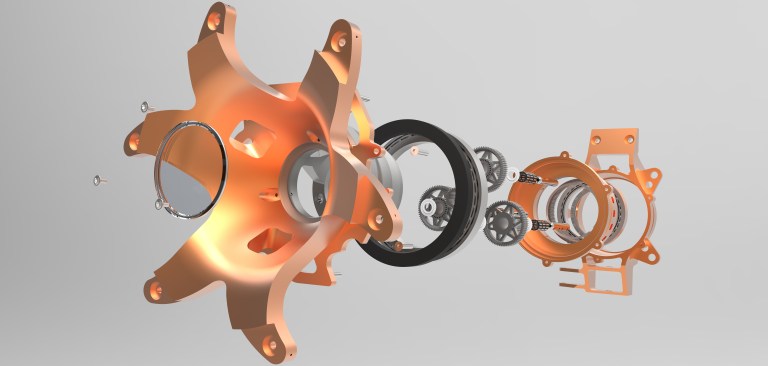
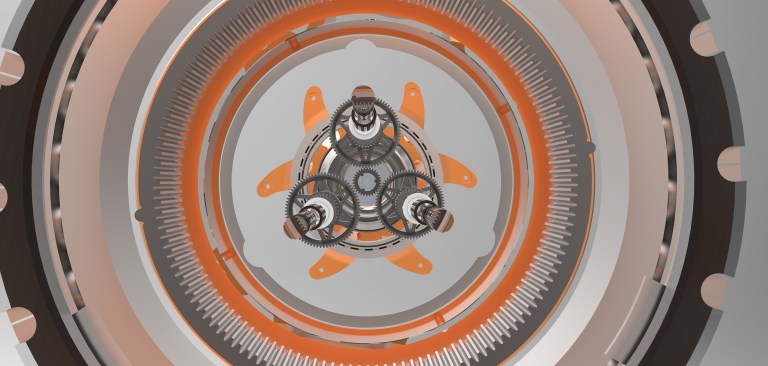
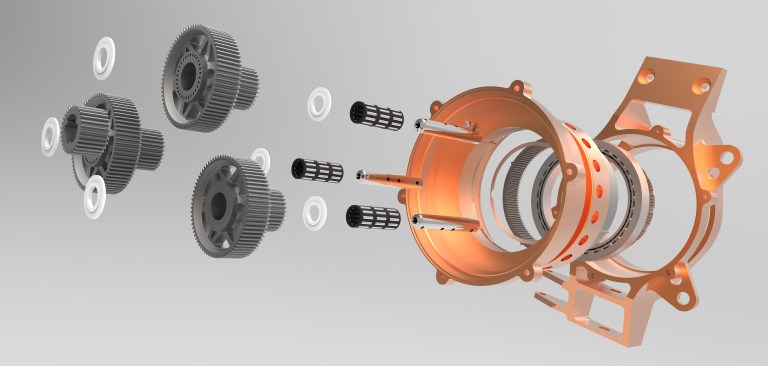
Final Drive
12:1 reduction using in-wheel compounded planetary gear sets.
Electronics
ECU
dSpace Microautobox II
Driver Interface
Smart display integrated in steering wheel. Use of profile system per driver for easy adjustable interfaces to driver preference.
Data Logging and Telemetry
Raspberry Pi 3 model B
Custom developed live telemetry dashboard using Sap Hana
Aerodynamics
Ansys fluent optimized aerodynamic package with front, rear and side wings. Featuring a drag reduction system on the rear wing and optimized cooling geometry. Validated using coast down runs and strain gauges on the suspension rods. Good for own weight in downforce at 110km/h.

Control
Self-developed velocity-vectoring control model integrating traction control, torque vectoring and ABS into one elegant system. In addition an active power limit controller is used with a state of charge estimation.
Software
Multiple smart tools which make debugging of the car easier. Using the telemetry system to do real – time data analysis and displaying the results real-time on the screen. Furthermore, a program to test the basic functions of the car for correct behavior and results.
URE had an incredible comeback midway through the 2016 competition season after a battery issue and that comeback earned them a lot of respect from their competition. The team are seriously well organised, are very willing to learn and share ideas, and have got big ambitions for 2017. I can’t wait to see the URE12 at the rollout and wish the team at URE a very successful competition season.

You can find out more about URE on their website or by following them on social media:
Author: Beth Lily Georgiou
Follow: @BethLilyRace

WOW !! These students have so much knowledge about car parts 😀 The suspension parts are perfectly designed.
To get a great outcome, it is really very important to work in a team properly.
Highly Impressed 🙂
LikeLike